






Dans le cas où les 5 secondes se sont écoulées, le cycle de démarrage de la sonde continue.
La sonde cherche à se synchroniser avec l’UTL. Des [Skip] peuvent apparaitre sur la ligne SYNC. Il s’agit de paquets de données envoyés vers l’UTL mais qui ne concernent pas cette sonde. Si au bout de 5 minutes, la sonde n’a toujours pas de synchronisation, une alarme est émise et la sonde part en sommeil pour 30 minutes. Elle se réveille, réémet une alarme, reboot et redémarre la synchronisation. Elle continue ce cycle jusqu’à ce qu’elle soit synchronisée avec l’UTL.
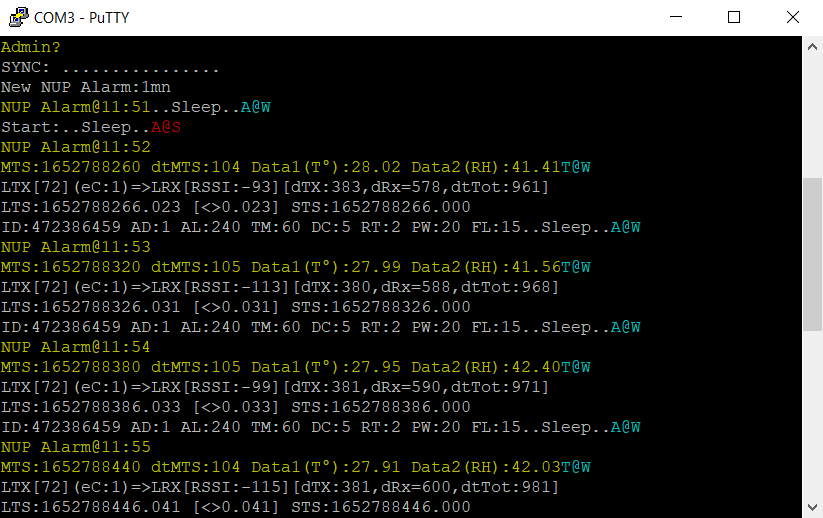
Le timer dans cet exemple qui vaut 1minute est récupéré à 9h11U.T.C. La sonde se met en sommeil. Le prochain réveil de l’alarme (New NUP Alarm) est affiché : 9h12U.T.C. A son réveil, elle affiche le timestamp au moment de la mesure (MTS), le temps de prise de mesure (dMTS) puis les données. Si la mesure possède une seule valeur, elles sont affichées dans Data(), suivi de Data1(), Data2(),.. en fonction du type de sonde.
La trame est ensuite envoyée vers l’UTL (LTX). On peut voir la taille et le nombre d’échecs d’envois si EC>1 (eC : error count) qui ont précédé.
Elle réceptionne la réponse de l’UTL (LRX) et affiche la qualité du signal (RSSI), ainsi que les temps d’envoi (dTX), temps de réception (dRX) et temps total (dtTot).
Ensuite, le timestamp de la sonde au moment où elle a reçu la réponse de l’UTL est affiché (LTS), avec les ms. STS correspond au timestamp de l’UTL. Si l’écart est supérieur à 100ms, l’horloge interne de la sonde (RTC) est recalée sur celle de l’UTL, le message « RTC Updated ! » s’affiche.
La ligne suivante affiche les paramètres de la sonde. Il s’agit d’un rappel, certains d’entre eux pouvant être modifiés via l’Extranet (noté *) :
- l’identifiant de la sonde (ID)*,
- l’adresse du serveur (AD),
- l’alarme en minutes depuis minuit (U.T.C.) (AL)*,
- le timer en secondes (TM)*,
- le décalage temporel en secondes (DC)*,
- le nombre de tentative (RT)*.
Si l’envoi n’est pas possible, un timeout rouge apparaît, la sonde attend 500ms, puis retente l’envoi jusqu’à atteindre le nombre de tentatives (RT) maximum.
Si l’envoi est en échec, la trame est stockée dans la mémoire de la sonde qui peut contenir 6 trames : les 5 premières sont statiques, la sixième est dynamique et effacée par la nouvelle mesure. A chaque tentative, la table entière est envoyée à l’UTL.
Si l’error count (eC) est de 1, la 1re ligne de la table est remplie, il s’agit d’une situation normale. Si l’eC est compris entre 2 et 5, alors on remplit les lignes 2 à 5 de la table, il y a eu échec précédemment dans l’envois. Pour les eC de 6 à 9, la 6è ligne est toujours écrasée. Après un eC égal à 9, si l’UTL ne répond pas, alors la sonde repasse en synchronisation (voir début de ce chapitre pour le cycle).